ESP32
深度学习
ccpc
硬件工程
分子对接
python内置函数
网络运维
IO
用户空间驱动
地图概括
后断开发
类图
ReentrantLock
上位机
共享充电桩小程序
codeblock
开题报告
VIVADO
tornado
电路分析
具体方法
2024/4/11 18:49:56
KUKA机器人通过3点法设置工作台基坐标系的具体方法
KUKA机器人通过3点法设置工作台基坐标系的具体方法 具体方法和步骤可参考以下内容: 进入主菜单界面,依次选择“投入运行”—“测量”—基坐标,选择“3点法”, 在系统弹出的基坐标编辑界面,给基座标编号为3,命名为table1,然后单击“继续”按钮,进行下一步操作, 在弹出的…

西门子S7-1200使用LRCF通信库与安川机器人进行EthernetIP通信的具体方法示例
西门子S7-1200使用LRCF通信库与安川机器人进行EthernetIP通信的具体方法示例 准备条件: PLC:S7-1200 1214C DC/DC/DC 系统版本4.5及以上。
机器人控制柜:安川YRC1000。
软件:TIA V17
PLC做主站,机器人做从站。 具体方法可参考以下内容: 使用的库文件为西门子 1200系列…

TIA博途中计算多个数据的算术平均值的具体方法示例
TIA博途中计算多个数据的算术平均值的具体方法示例 我们这里采用官方提供的Floating Average功能块来实现多个数据的算术平均值的计算。 此功能块计算最新输入的100个数值的均值(浮动平均值)。采集的数据队列达到100个之后,队列每入栈一个新数值,将去掉一个队列里最早进来的…
ABB机器人示教器切换显示语言的具体方法
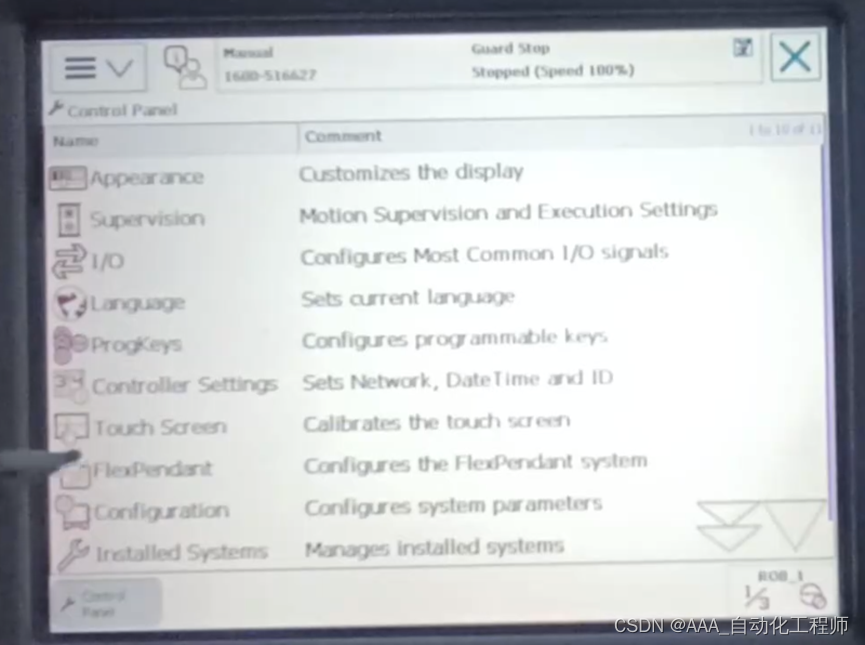
ABB机器人示教器切换显示语言的具体方法 如下图所示,ABB机器人默认的显示语言是英文, 如何将示教器显示的语言切换成中文呢? 具体的步骤可参考以下内容: 如下图所示,点击左上角的菜单键,
如下图所示,找到“Control Panel”, 如下图所示,进入“控制面板”界面, 如下…
TIA博途-32位浮点数大小端存储-高低字节转换的具体方法示例(4种字节排列顺序)
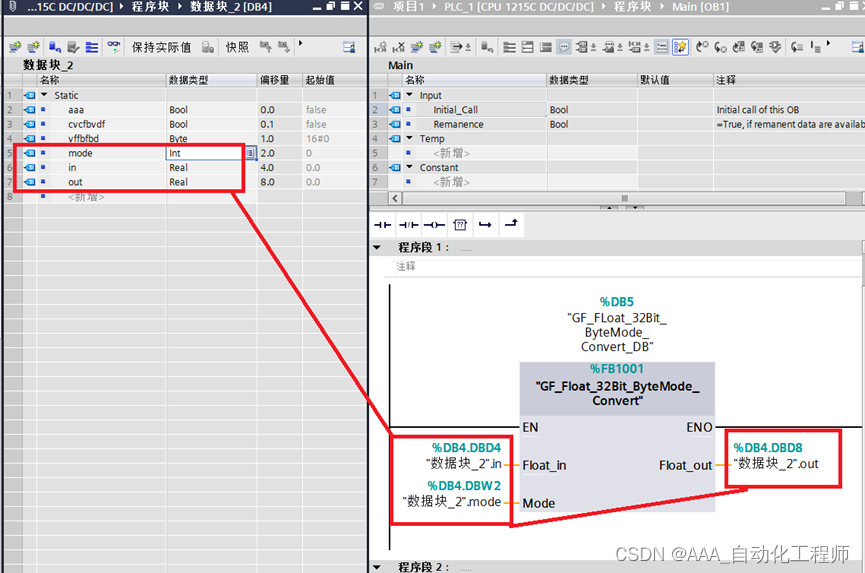
TIA博途-32位浮点数大小端存储-高低字节转换的具体方法示例(4种字节排列顺序) 如下图所示,新建一个项目后,添加一个1215PLC,添加一个FB块,块的接口变量如下,
如下图所示,该FB块的具体程序可参考下面的内容:
如下图所示,在数据块种添加3个变量用于FB块的功能测试,…

TIA博途Wincc_通过VBS脚本实现电机风扇或水泵旋转动画的具体方法
TIA博途Wincc_通过VBS脚本实现电机风扇或水泵旋转动画的具体方法 前面和大家介绍了通过在PLC中编程,结合HMI的图形IO域实现电机风扇或水泵旋转动画的具体方法,详细内容可参考以下链接:
TIA博途Wincc中制作电机风扇或水泵旋转动画的具体方法示例 本次和大家分享通过VBS脚本实…

WinCC V7.5 中的C脚本对话框不可见,将编辑窗口移动到可见区域的具体方法
WinCC V7.5 中的C脚本对话框不可见,将编辑窗口移动到可见区域的具体方法 由于 Windows 系统更新或使用不同的显示器,在配置C动作时,有可能会出现C脚本编辑窗口被移动到不可见区域的现象。
由于该窗口无法被关闭,故无法进行进一步…
TIA博途中通过SCATTER指令实现将字节BYTE拆分成单个位的具体方法示例
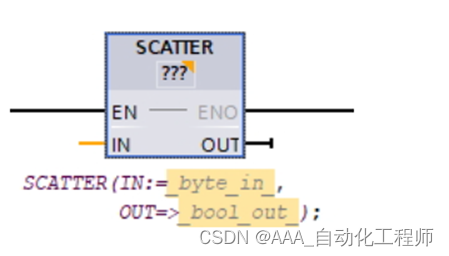
TIA博途中通过SCATTER指令实现将字节BYTE拆分成单个位的具体方法示例 例如: 我们想判断某个字节中各个位的状态是1还是0 ,如何实现呢? 这里介绍通过SCATTER指令拆分字节的方法,仅供大家参考。 首先,我们先了解以下SCATTER指令的基本功能和使用方法: 如下图所示,在基本指…

S7-1200通过外部端子控制V20变频器启停+MODBUS读写频率的具体方法
S7-1200通过外部端子控制启停+MODBUS读写频率的具体方法 本例中是通过S7-1200PLC外部端子的方式控制变频器启停,用Mobus RTU通讯读写变频器频率。 硬件连接: 屏蔽双绞线将V20变频器P+,N-连接到CPU上CB1241 T/RA 和T/RB, T/RB接P+,T/RA接N-。TA和T/RA用短线连上,TB和T/RB用短…

FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法
FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法 前提: FANUC机器人编码器或其线路有损坏,一般先将机器人移动至零点位置,编码器相关部件更换完毕后,直接进行零点标定即可。但是对于突发的状况,这种方法显然是不行的,比如在生产过程中突然发生碰撞导致编码器相…

西门子精彩触摸屏SMART LINE V4 面板使用U盘下载项目程序的具体方法示例
西门子精彩触摸屏SMART LINE V4 面板使用U盘下载项目程序的具体方法示例 WinCC flexible SMART V4 SP1 软件针对SMART LINE V4 面板新增了使用U盘下载项目功能。 注意:“使用U盘下载项目”功能仅支持触摸屏OS版本为V4.0.1.0 及以上的设备。 使用U盘下载项目的步骤可参考以下内…

三菱FX5U系列PLC之间进行简易PLC间链接功能的具体方法
三菱FX5U系列PLC之间进行简易PLC间链接功能的具体方法 功能介绍: 在最多8台FX5U或者FX3U PLC之间通过RS-485通信方式连接,进行软元件相互链接的功能。 接线注意事项: 根据链接模式和所使用的从站数量的不同,链接软元件的占用点数也有所变化。根据链接软元件的起始编号,对占…
TIA博途Wincc中制作电机风扇或水泵旋转动画的具体方法示例
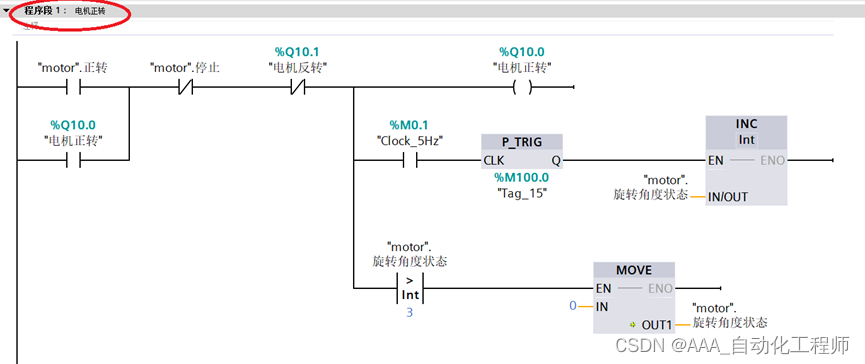
TIA博途Wincc中制作电机风扇或水泵旋转动画的具体方法示例 如下图所示,打开TIA博途软件,新建一个项目,添加一个1215 PLC,双击进入设备组态,设置属性—常规—系统和时钟存储器,勾选“启用系统存储器字节”、“启用时钟存储器字节”,
如下图所示,添加一个全局DB块,这里…

S7-200SMART PLC模拟量应用及创建库文件的具体方法
S7-200SMART PLC模拟量应用及创建库文件的具体方法 具体使用方法可参考以下内容: 模拟量计算公式: OUT = (In_chx - In_RawMin) * (In_EuMax - InEuMin) / (In_RawMax -In_RawMin) + In_EuMin 其中: OUT:转换后的实际值; In_chx:模拟量采集值; In_RawMax:原始数据的最大…
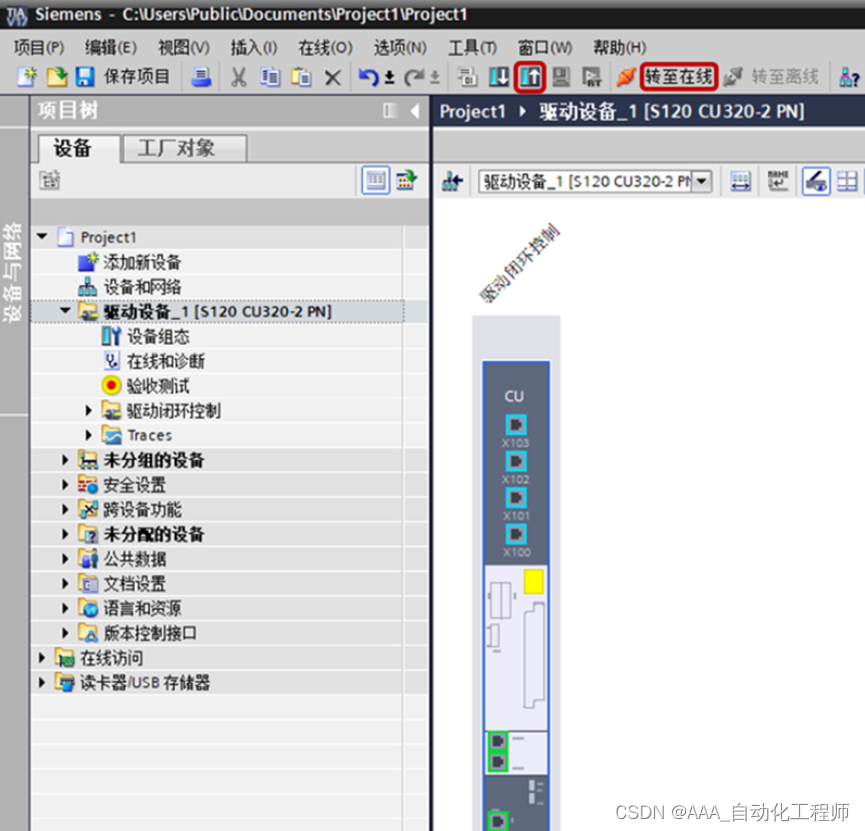
Startdrive中上传参数设置的具体方法和注意事项
Startdrive中上传参数设置的具体方法和注意事项 适用于配 SINAMICS S120、G130、G150、S150和MV(基于CU3x0-2的驱动器)和所有启动驱动器版本INAMICS G115D/G120/G120D/G120C/G120P/G110M(基于CU2x0-2的驱动器) 根据SINAMICS类型的不同,Startdrive中的Upload参数有所不同。…
松下机器人进行数据备份与恢复的具体方法
松下机器人进行数据备份与恢复的具体方法 数据备份 如下图所示,找到备份选项,按确认,
如下图所示,选择保存,按确认键,
如下图所示,选择USB存储设备,选择存储路径,按确认键,
选择需要备份的数据,如下图所示,默认情况下是勾选“全部数据”,
如下图所示,显…
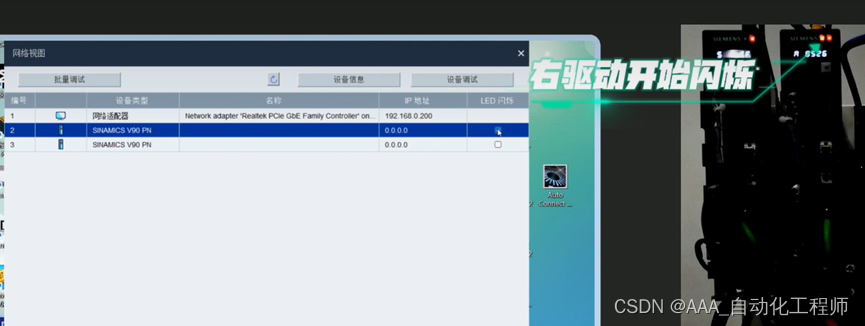
V90伺服驱动器设置IP地址和PN设备名称的具体方法(2种)
V90伺服驱动器设置IP地址和PN设备名称的具体方法(2种) 1. 通过V-ASSISTANT软件进行配置 首先下载并安装V-ASSISTANT软件,然后将V90通过网线连接到电脑上,注意此时电脑使用的网卡,不能选择无线网卡, SINAMICS-V90伺服调试软件V-ASSISTANT_V1.07.01
打开V-ASSISTANT软件,…
KUKA机器人零点标定的具体方法
KUKA机器人零点标定的具体方法 在进行机器人校正时,先将各轴置于一个定义好的机械位置,即所谓的机械零点。这个机械零点位置表明了同轴的驱动角度之间的对应关系,它用一个测量刻槽表示。 为了精确地确定机器人某根轴的机械零点位置,一般应先找到其预校正位置,然后去掉测量…
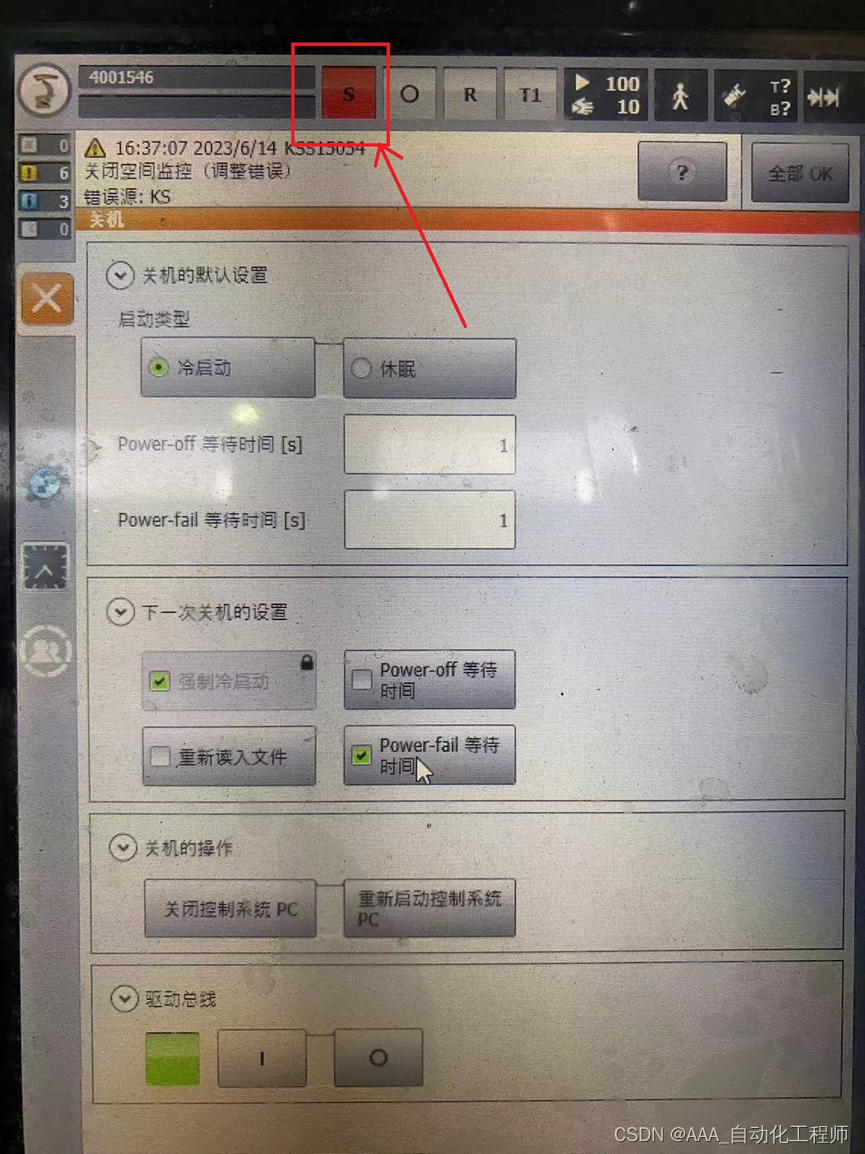
KUKA机器人通过示教器进行关机冷启动的具体方法演示
KUKA机器人通过示教器进行关机冷启动的具体方法演示 如下图所示,首先需要登录管理员权限,默认密码:KUKA,然后点击左上角的机器人图标进行菜单选项,找到并点击“关机”选项,
如下图所示,找到并点击“重新启动控制系统PC”,
如下图所示,此时系统提示:确实要重新启动…
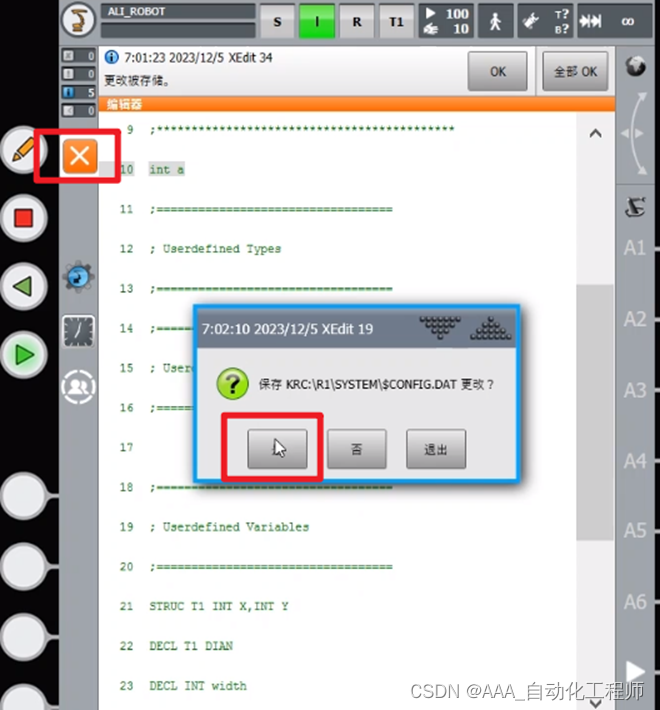
KUKA机器人如何自定义数值型变量?
KUKA机器人如何自定义数值型变量? 在KUKA机器人系统中如何自定义数值型变量来实现工件计数、计时等功能? 具体方法可参考以下内容: 如下图所示,找到SYSTEM—CONFIG.DAT文件,进入(需要管理员权限), 如下图所示,在第10行自定义一个int型的变量a, 如下图所示,自定义完成…
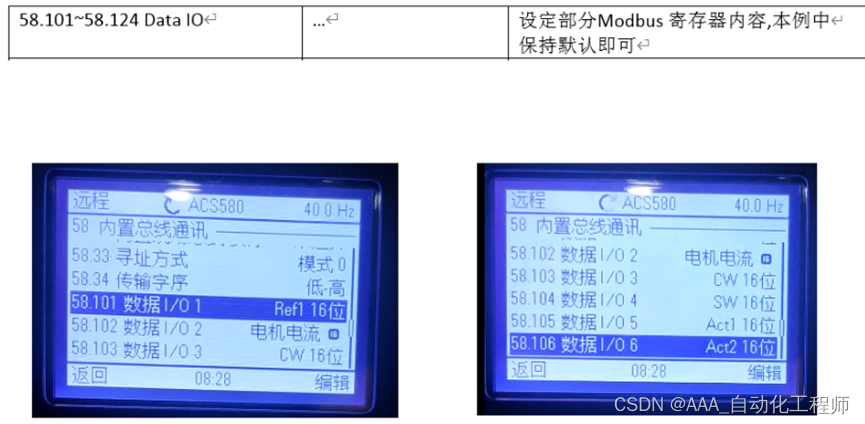
S7-200 SMART与ABB ACS580变频器进行MODBUS RTU通信的具体方法示例
S7-200 SMART与ABB ACS580变频器进行MODBUS RTU通信的具体方法示例 1. ABB ACS580变频器一侧的设置: